singing birds
10 watts amplifier with built-in 16-bit / 48kHz RIFF-WAVE player (music on a SD-CARD). 2 servos for controlling the beaks. I did this project mostly to learn stuff. The result is a bit stupid.
VIDEO:
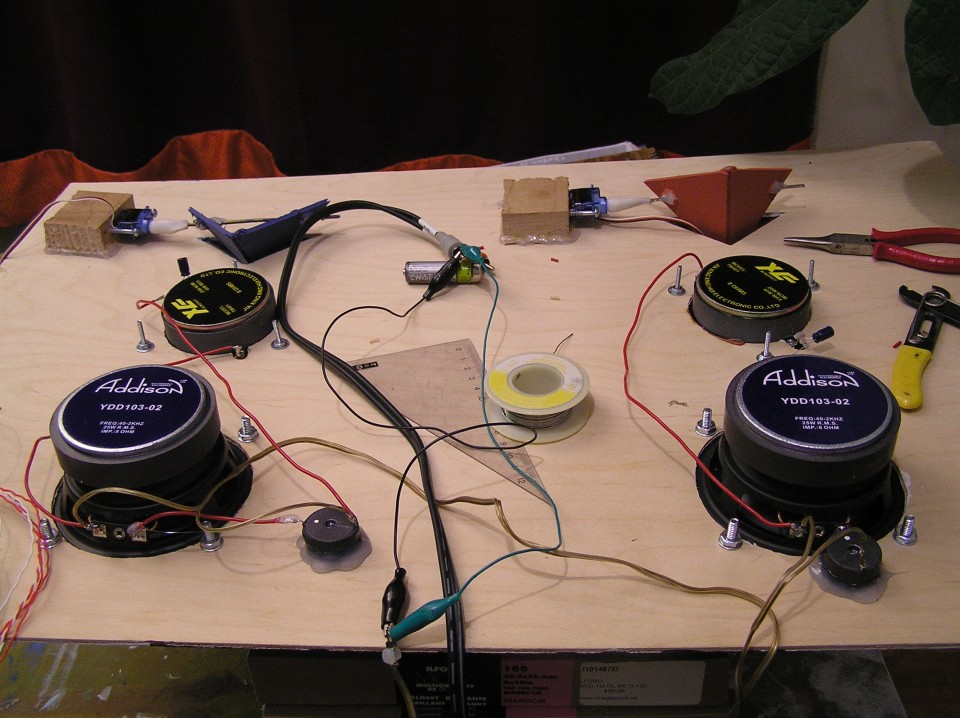
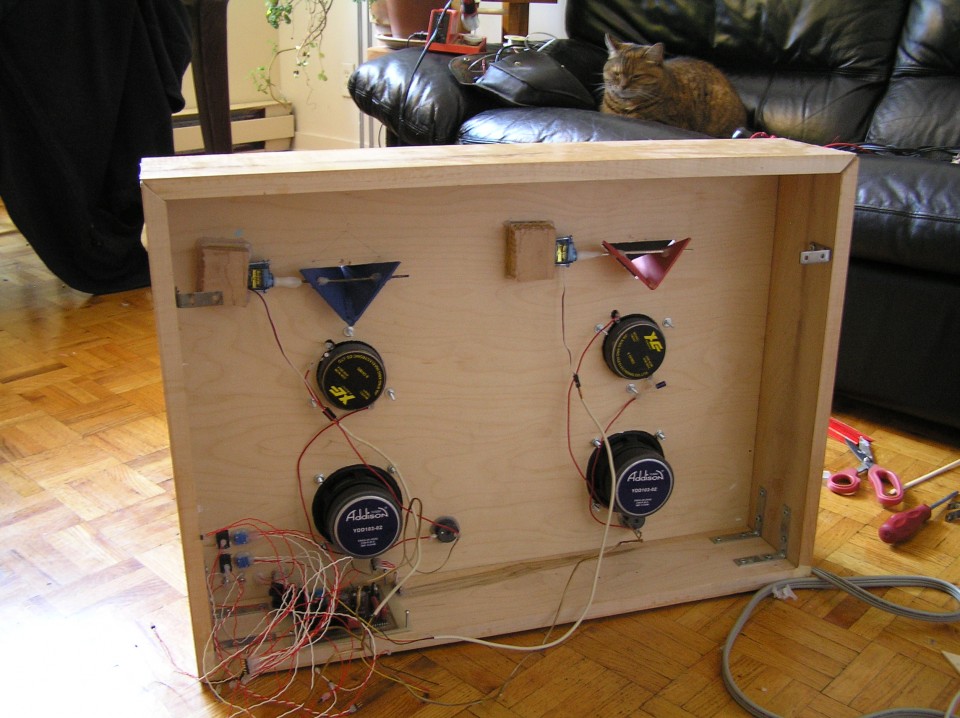
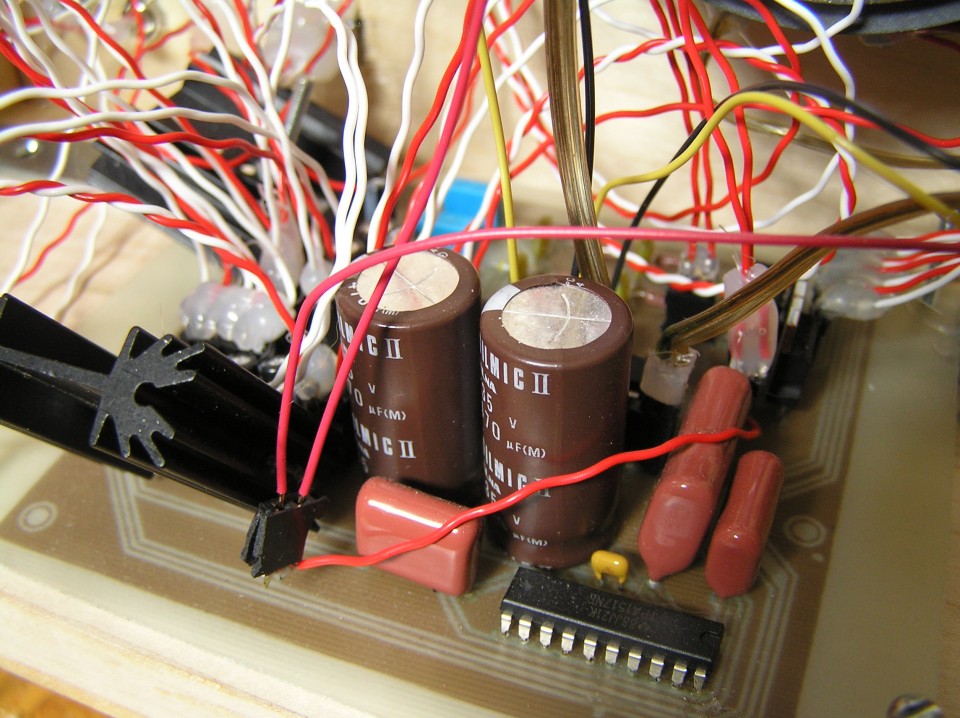
PHOTOS:

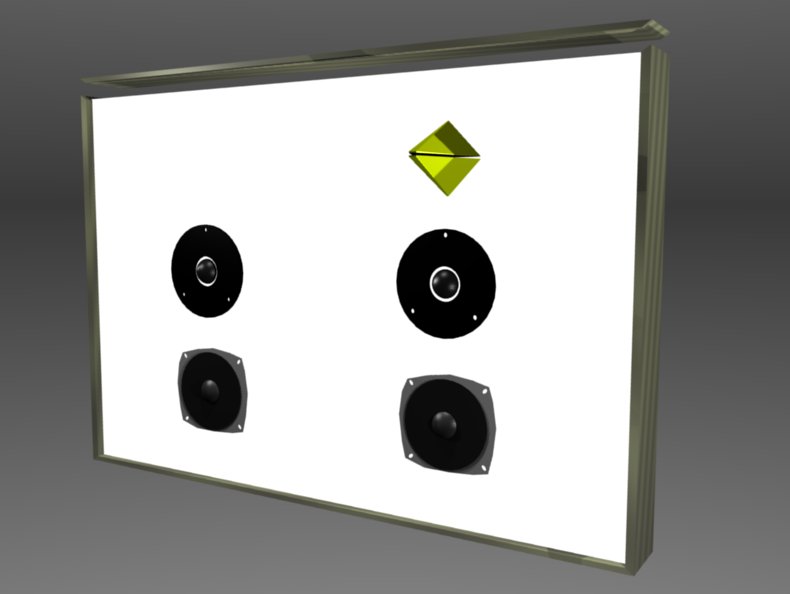
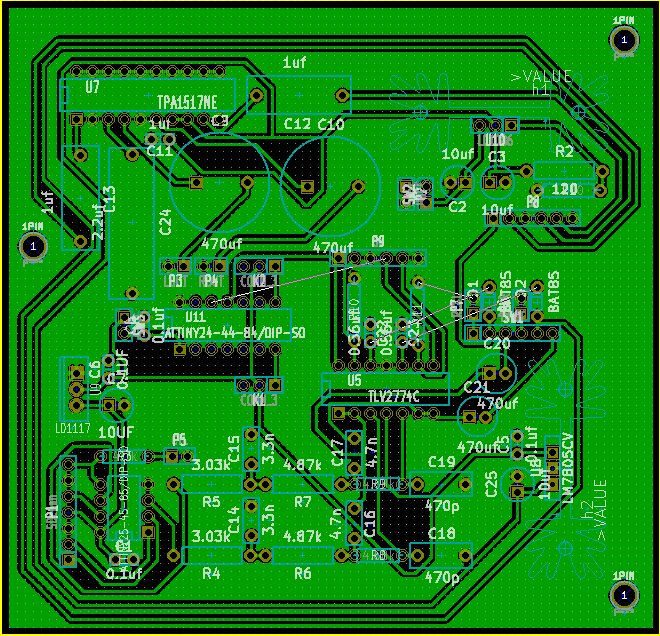
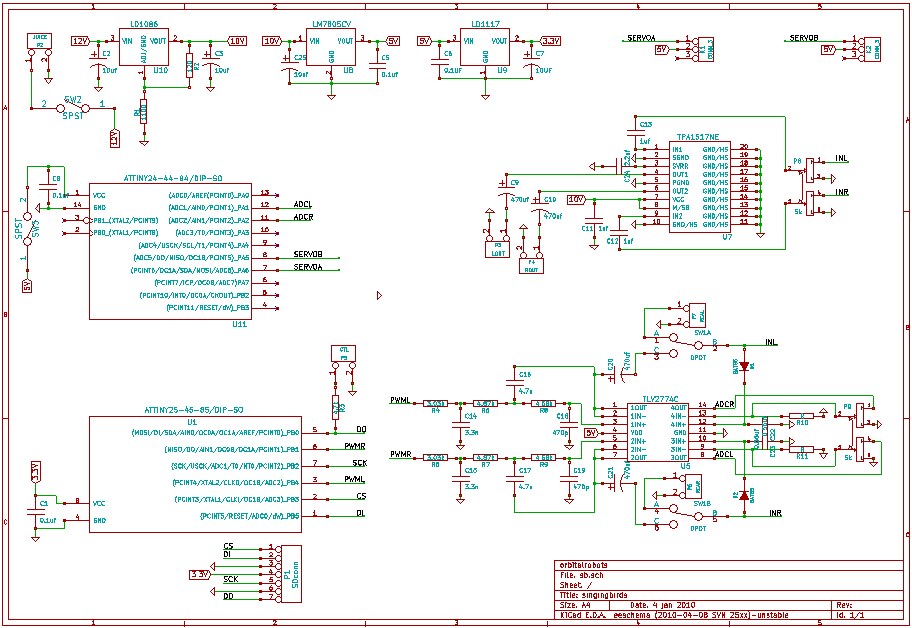
Schematic & Board (Kicad)
How to filter PWM for music
Bravo Pat,
J’aime le résultat!!! Et ton choix de l’arbre pour le dessin.
Cool !
Dominick
Wow! Super. Très bon résultat, je trouve. Un VU-Meter en bec d’oiseau. :) En fait, j’ai eu exactement la même idée il y a 2-3 ans, mais je ne l’ai jamais fait! (moi, je voulais en faire une marionnette) Le faire, c’est autre chose ! Bravo à toi et ta persévérance. :)
Alex